You are not logged in.
- Topics: Active | Unanswered
#1 2018-03-13 22:33:45
- Mashaccny
- Member
- Registered: 2018-03-13
- Posts: 10
Building 3d bioprinter. Adding extra features to nanodlp!
Hello there!
We are trying to build a bioprinter and long story short - we are trying to incorporate a use of 2 stepper motors into our design (they have different functions - one is for z-axis movement and another is for timed pumping). We are using the same LCD screen as Wanhao Duplicator 7.
1)Could we avoid using the arduino with RAMPS if we just purchase a motor hat for our raspberry pi 3?
2)How do we add an additional feature here on nanodlp to control a second stepper motor?
3)Another option is to access remote terminal window emulator (putty) and control the second motor from there. How can we synchronize that with operation on nanodlp?the website mentions "Before and after each layer you can call any external program (bash, python and etc) with arguments, and receive the result and use result in your gcode" - does that mean we can call putty from nanodlp?
Please help! Any piece of advice will be highly appreciated!
Offline
#2 2018-03-14 02:59:06
- bigfilsing
- Member
- Registered: 2016-11-20
- Posts: 306
Re: Building 3d bioprinter. Adding extra features to nanodlp!
Hi, I cant really help with questions 2 or 3 but regarding the stepper driver. Yes, you can use a suitable motor hat. The basic set up is noted here > https://www.nanodlp.com/download/ Scroll to the bottom and read "Direct control"
A guy I follow on youtube has just released his variant with a great explanation of its various functions >> https://www.youtube.com/watch?v=Wb5JIAkboEg
However, if you consider your requirement for multiple stepper motors the ramps/mega starts to make more sense. With Marlin firmware already supporting NanoDLP (comms feedback that NanoDLP can use) and the easily addressable/usable functions via gcode you might want to still consider the ramps / Mega 2560 combo.
There are a few horror stories out there re the ramps1.4 but that's mainly by users that didn't set it up / wire it properly. After all its a very cheap solution and treated with care works well. There's now also a 1.5 version with some significant improvements.
https://www.ebay.com/itm/3D-Printer-Con … 2749.l2649
Good luck
Last edited by bigfilsing (2018-03-14 02:59:49)
Offline
#3 2018-03-14 03:24:25
- Mashaccny
- Member
- Registered: 2018-03-13
- Posts: 10
Re: Building 3d bioprinter. Adding extra features to nanodlp!
Thank you for your input! I was talking about the DC&Stepper motor hat for Rpi from Adafruit https://www.adafruit.com/product/2348?g … voEALw_wcB Do you think that might work instead of soldering our own nanodlp shield from scratch ?
Offline
#4 2018-03-14 04:07:39
- bigfilsing
- Member
- Registered: 2016-11-20
- Posts: 306
Re: Building 3d bioprinter. Adding extra features to nanodlp!
Thank you for your input! I was talking about the DC&Stepper motor hat for Rpi from Adafruit https://www.adafruit.com/product/2348?g … voEALw_wcB Do you think that might work instead of soldering our own nanodlp shield from scratch ?
I cant see any reason why it would not work. However, it uses H bridges to control the stepper and that's not the best, most efficient way ( hence there being dedicated stepper drivers) to drive a stepper motor.
I would recommend you look for a hat that has the standard Pololu style stepper drivers ( driver chip mounted on dedicated small PCB) which aside from the ease of change ( should you blow one) gives microsteps
which will increase your Z height resolution.
For initial testing purposes you could simply mount the stepper driver(s) on a breadboard then when its all working move it to a perf board
Heres a video of breadboard mounting ( the video is re driver repair but the info is valid for your use too)
https://youtu.be/UejSUgvbUgE?t=10m10s
( don't forget the decoupling and filtering capacitors)
Offline
#5 2018-03-14 05:38:54
- Shahin
- Administrator
- Registered: 2016-02-17
- Posts: 3,556
Re: Building 3d bioprinter. Adding extra features to nanodlp!
2) Currently it is not possible
3) Yes, you have access to the same commands as you have through putty.
Offline
#6 2018-03-14 17:19:06
- Mashaccny
- Member
- Registered: 2018-03-13
- Posts: 10
Re: Building 3d bioprinter. Adding extra features to nanodlp!
2) Currently it is not possible
3) Yes, you have access to the same commands as you have through putty.
Does this mean that we can write a python script for our second motor (or any other additional external elements), save it, and call it from nanodlp? and do so after each print too? look at this image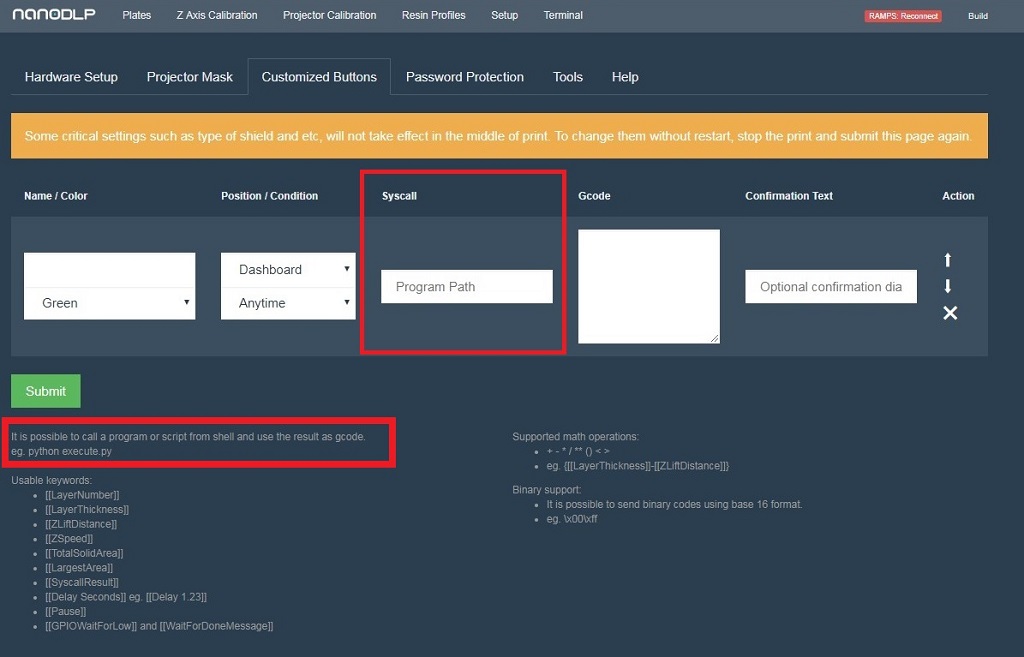
in the red box you can see it says "It is possible to call a program or script from shell and use the result as gcode" and the 'syscall' is where you'd put the script path in?
also, here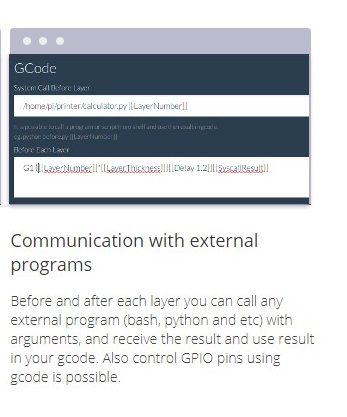
thank you for your help!!
Offline
#7 2018-03-14 19:54:39
- Shahin
- Administrator
- Registered: 2016-02-17
- Posts: 3,556
Re: Building 3d bioprinter. Adding extra features to nanodlp!
Yes you can
Offline
#8 2018-03-16 16:12:23
- Mashaccny
- Member
- Registered: 2018-03-13
- Posts: 10
Re: Building 3d bioprinter. Adding extra features to nanodlp!
Yes you can
so let's say we have a code for control of a DC pump. and we want to pump after each layer is cured. so that's feasible if we just call a python script for that in nanodlp?
Offline
#9 2018-03-16 20:27:34
- Shahin
- Administrator
- Registered: 2016-02-17
- Posts: 3,556
Re: Building 3d bioprinter. Adding extra features to nanodlp!
Sure, but if will be better if you could have program listening on specific port and listen to commands from nanodlp.
Offline